在人工智能快速发展的今天,多智能体系统成为实现复杂任务的重要途径。本文将深入探讨三个代表性框架:AutoGPT、BabyAGI和CrewAI,并展望未来多智能体协同系统在自适应、动态资源调度与自我进化方面的发展方向。
一、AutoGPT:自主运行的GPT智能体
1. 核心概念与原理
AutoGPT是一个开源项目,旨在使GPT模型能够自主运行,无需或少需人工干预。其核心原理是通过"思考+行动"的方式,让模型不断地进行决策并反馈结果。
AutoGPT的基本原理是采用ReAct(Reason+Act)方法,让LLM一遍又一遍地决定要做什么,同时将其操作的结果反馈到提示中。ReAct方法强调在提示词中嵌入推理过程,使模型不仅能够生成答案,还能解释其推理过程。腾讯云
2. 工作流程
AutoGPT的工作流程主要包括以下步骤:
- 目标设定:用户向AutoGPT提供明确的目标
- 任务分解:系统将目标分解为多个子任务
- 执行计划:制定执行计划,确定任务优先级
- 自主运行:自主与GPT模型交互,执行任务
- 状态监控:持续跟踪进度和结果
- 结果输出:完成任务后输出最终结果
AutoGPT的策略是按最近的History和最相关的Memory的方式来组织GPT的记忆,以达到Prompt Loop在Token限制下也能按越来越趋近完成的方式来运转。知乎
3. 特点与应用
AutoGPT具有以下几个关键特点:
- 自主性:能够自主决策和执行任务
- 记忆管理:管理短期和长期记忆,优化提示效率
- 工具使用:能够使用各种工具如网络搜索、文件操作等
- 目标导向:基于用户指定的目标进行任务规划和执行
应用场景包括自动化内容创作、研究辅助、数据分析、代码生成等多个领域。
二、BabyAGI:任务驱动型智能体
1. 核心概念与原理
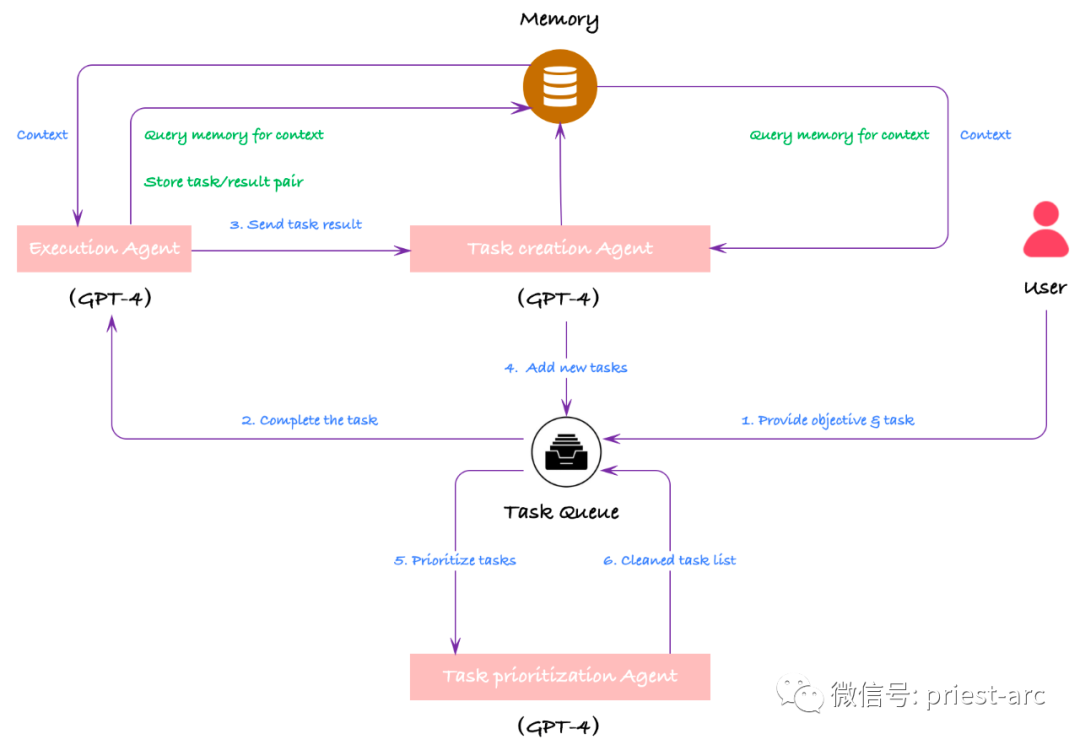
BabyAGI是一个AI支持的任务管理系统,使用OpenAI和Pinecone API进行任务创建、优先级排序和执行。其最大特点是能够根据先前任务的结果动态生成新任务并调整优先级。
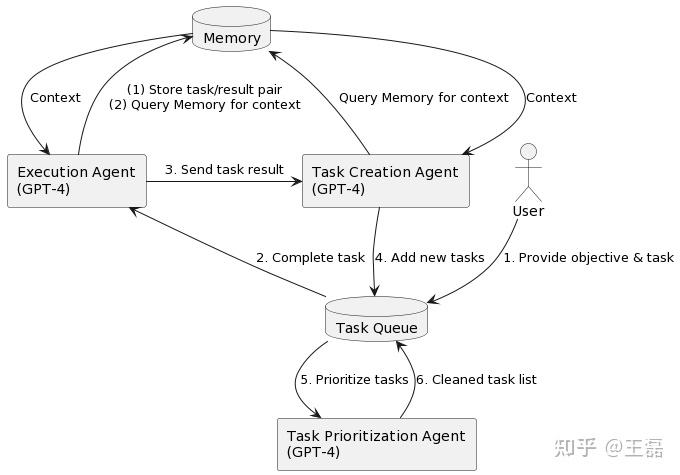
BabyAGI采用精简的架构,能够根据预定义的目标自动生成任务、确定任务的优先级和执行任务。BabyAGI主要由任务创建、执行和优先级管理三个核心组件构成。知乎
2. 工作流程
BabyAGI的工作流程是通过运行一个无限循环来完成以下步骤:
- 任务提取:从任务列表中提取第一个任务
- 任务执行:将任务发送到执行代理,使用OpenAI的API根据上下文完成任务
- 任务创建:基于执行结果生成新任务
- 任务优先级排序:评估新任务与目标的相关性,确定优先级
- 向量存储:将任务结果存储在向量数据库中,用于后续检索
BabyAGI的工作原理是基于一个动态更新的任务列表,不断生成、执行和优化任务,使系统能够自动适应和发展。云豆
3. 特点与应用
BabyAGI的主要特点包括:
- 自驱动性:能够基于前序任务结果自动生成新任务
- 优先级动态调整:根据任务与目标的相关性动态调整优先级
- 向量存储:使用Pinecone进行高效的相似性搜索和任务存储
- 轻量级设计:采用简洁架构,易于理解和扩展
应用场景包括研究规划、内容创作、市场分析、学习辅助等需要持续任务管理的领域。
三、CrewAI:角色扮演协作框架
1. 核心概念与原理
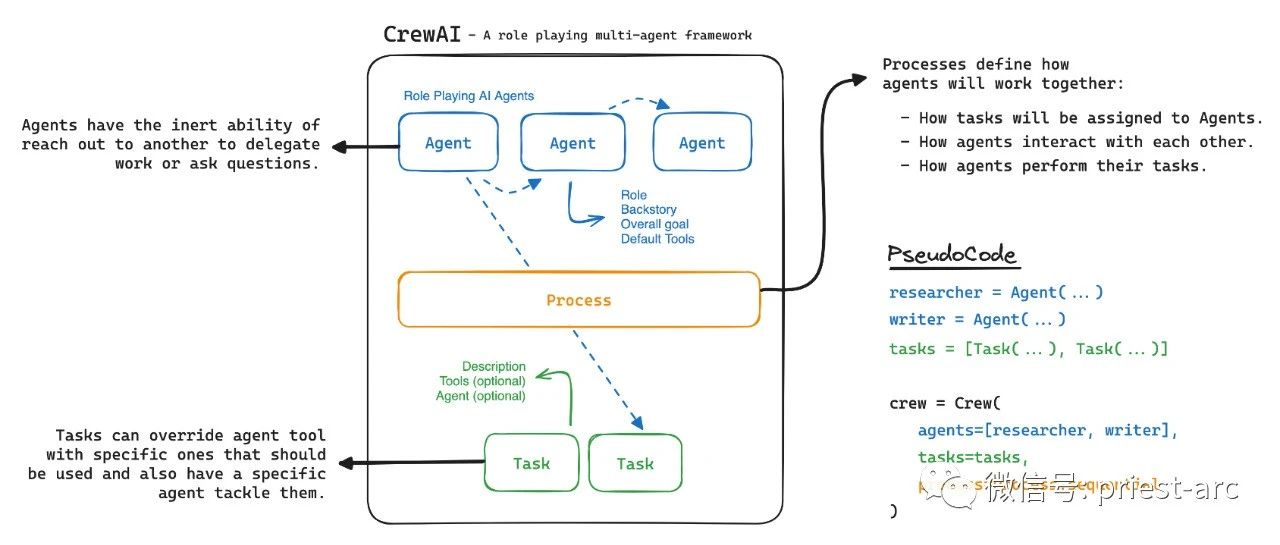
CrewAI是一个用于协调角色扮演、自主AI智能体的开源框架,由João Moura创建。它允许多个智能体作为一个内聚的集合体或"团队"协作完成复杂任务。
CrewAI提供了一组通用的工具和库,可用于处理多代理系统的常见任务,如代理通信、协调和决策。它基于角色扮演的概念,让每个智能体承担特定的角色和职责。腾讯云
2. 工作流程
CrewAI的工作流程主要包括:
- 角色定义:定义各个智能体的角色、技能和责任
- 任务分配:为每个智能体分配特定的任务
- 协作机制:设置智能体之间的协作关系和通信机制
- 执行流程:智能体按照预定义的工作流程协作执行任务
- 结果整合:汇总各个智能体的执行结果
CrewAI通过精心设计的协作机制,使得具有不同专长的智能体能够协同工作,共同完成复杂任务。知乎
3. 特点与应用
CrewAI的主要特点包括:
- 角色扮演:每个智能体扮演特定角色,具有明确的职责和技能
- 团队协作:通过预定义的协作模式促进智能体之间的有效配合
- 流程管理:提供灵活的工作流定义,支持顺序和并行执行
- 任务适配:适合需要多方面专业知识的复杂任务
应用场景包括内容创作团队、市场分析、客户支持自动化、研究与开发等需要多专业协作的领域。
四、多智能体系统的自适应机制
1. 自适应能力的重要性
在复杂多变的环境中,自适应能力是多智能体系统成功的关键。自适应机制使智能体能够根据环境变化和任务需求调整策略,提高系统的灵活性和鲁棒性。

自适应行为使智能体能够根据环境变化和任务需求调整策略,而进化算法和智能体进化则通过模拟自然进化过程,实现群体中的策略和行为优化。知乎
2. 当前自适应机制的实现方式
目前的多智能体系统主要通过以下几种方式实现自适应:
- 强化学习:通过奖励机制不断优化决策策略
- 元学习:学习如何更快地适应新任务和环境
- 进化算法:通过模拟自然进化过程优化智能体行为
- 案例推理:基于历史经验进行决策调整
- 动态触发机制:基于条件触发的策略调整
近年来,强化学习与自适应动态规划算法的迅猛发展使其在大规模多智能体系统优化决策和最优协调控制问题中取得成功应用。控制与决策
3. 未来自适应机制的发展方向
未来的多智能体自适应机制将朝着以下方向发展:
- 环境感知增强:提高对环境变化的敏感度和适应速度
- 多层次自适应:从个体、群体到系统层面的自适应协同
- 自适应通信:根据任务需求动态调整通信结构和频率
- 跨任务迁移:将在一个任务中学到的经验迁移到新任务
- 自适应协作模式:根据任务类型动态选择最优协作方式
基于新型自适应事件触发通信条件的研究,可以有效地减少智能体之间的通信频率,提高系统效率。自动化学报
五、多智能体资源调度机制
1. 资源调度的挑战与重要性
在多智能体系统中,资源调度面临计算资源有限、任务需求多样、环境动态变化等挑战。高效的资源调度机制是系统性能和效率的关键。

车辆高移动性带来的信道的快速变化为集中式管理网络资源带来了局限性,因此将资源共享建模为多智能体深度强化学习问题,提出基于分布式执行的多智能体深度确定性策略梯度算法。北京交通大学学报
2. 当前资源调度机制的实现方式
目前多智能体系统主要采用以下资源调度机制:
- 集中式调度:由中央控制器统一分配资源
- 分布式调度:智能体自主协商资源分配
- 基于市场的调度:通过虚拟经济模型分配资源
- 基于优先级的调度:根据任务优先级动态分配资源
- 深度强化学习调度:基于强化学习自适应优化资源分配
MARO是一个多智能体资源调度平台,通过高效的仿真引擎和分布式框架,使得训练一个包含成千上万个智能体的系统成为可能。知乎
3. 未来资源调度机制的发展方向
未来的多智能体资源调度将向以下方向发展:
- 预测性调度:基于任务预测提前规划资源分配
- 分层调度:结合集中式和分布式调度的优势
- 跨域资源调度:跨越不同领域的资源统一协调
- 自学习调度策略:自动学习最优资源分配策略
- 弹性资源池:根据任务需求动态扩展或收缩资源
基于多智能体深度强化学习的集群资源调度方法,通过生成随机合成的作业序列或基于云服务提供商公开数据的真实作业序列,进行资源优化分配。Google Patents
六、多智能体自我进化机制
1. 自我进化的概念与意义
自我进化是指多智能体系统能够根据经验不断改进自身能力和策略,无需或少需人工干预。这种能力对于构建真正自主的AI系统至关重要。
基于大语言模型的智能体已经开始实现"自我进化",不再需要人类监督者的帮助。通过学习专家轨迹和自主探索,智能体能力不断提升。CSDN
2. 当前自我进化机制的实现方式
目前的自我进化机制主要包括:
- 自监督学习:通过自我生成的数据进行学习
- 元学习:学习如何学习,提高学习效率
- 演化计算:通过模拟进化过程优化智能体
- 知识蒸馏:从复杂模型中提取知识到简单模型
- Agent-as-a-Judge:智能体评估其他智能体系统,提供改进建议
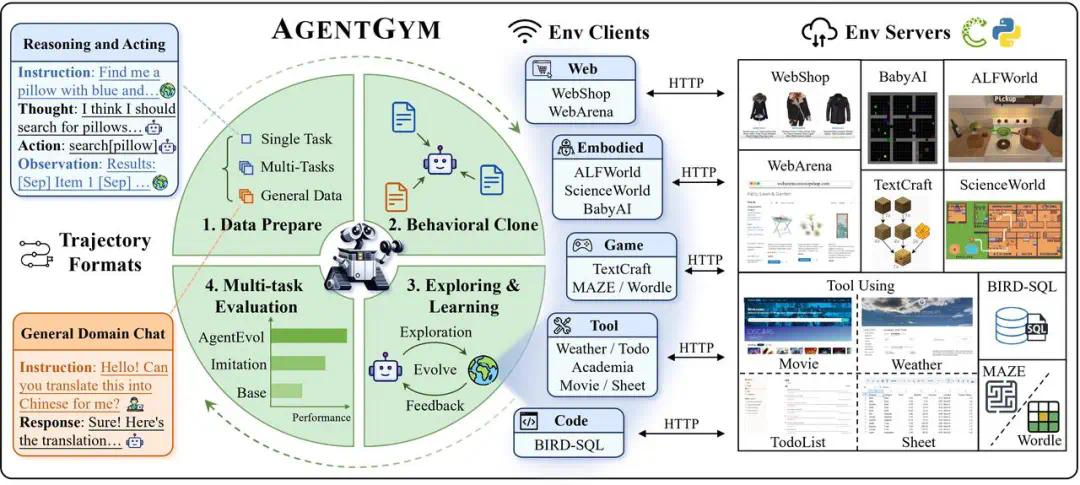
AgentEvol算法首次探索了通用智能体的自我进化能力,在多项智能体任务上表现非凡,与GPT-4、Claude等SOTA模型比肩。机器之心
3. 未来自我进化机制的发展方向
未来多智能体自我进化将向以下方向发展:
- 自我意识与反思:具备评估自身表现和局限性的能力
- 社会化学习:通过与其他智能体交互学习新能力
- 跨模态进化:在多种数据模态中同步提升能力
- 自我修复与适应:自主识别并修复系统缺陷
- 持续学习:在不忘记已有知识的前提下学习新知识
清华、港大提出的跨任务自我进化策略让智能体学会"以经验为鉴",不仅能提升智能体处理新任务时的效率和效果,还能显著降低对智能体基座模型能力的需求。中国科学院
七、未来多智能体协同系统的整合框架
1. 整合框架的设计原则
未来多智能体协同系统的整合框架应遵循以下设计原则:
- 模块化:各功能模块松耦合,便于替换和升级
- 可扩展性:支持新智能体和功能的无缝接入
- 透明性:智能体行为和决策过程可解释
- 鲁棒性:系统能够应对各种意外情况和失败
- 效率与性能:优化资源使用,提高系统响应速度

多机协同智能系统由多个自治、交互的异构智能系统组成。研究目标是设计和实现多个智能系统之间的协作与竞争机制,使每个单机在达成自身目标的同时实现综合目标。中国工程院
2. 框架组件与交互机制
未来整合框架的核心组件将包括:
- 协调中心:负责智能体分配和调度
- 知识引擎:管理和共享多智能体知识
- 自适应层:根据环境和任务调整系统策略
- 资源管理器:优化计算和存储资源分配
- 安全与隐私模块:保障系统安全和数据隐私
- 通信中枢:确保智能体间高效通信
这些组件通过标准化接口交互,形成一个有机整体,协同完成复杂任务。
3. 应用场景与前景展望
未来多智能体协同系统将在以下领域发挥重要作用:
- 智能城市管理:交通、能源、安全等多方面协同优化
- 医疗健康:多专科协同诊断与治疗方案制定
- 科学研究:多学科知识整合与创新发现
- 企业决策:融合多维度数据分析与决策推荐
- 个人智能助手:多场景、多需求的全方位服务
AI自我进化将使用个性化数据不断学习和优化,实现多智能体协作和认知方面的突破。这一过程基于共享式内核架构,其中各个模型通过处理个性化经验实现能力提升。36氪
结语
AutoGPT、BabyAGI和CrewAI作为多智能体系统的代表框架,展示了人工智能在自主性、任务管理和协作方面的强大潜力。未来的多智能体协同系统将在自适应、资源调度和自我进化等方面取得突破,实现更高效、更智能的协同工作方式,为人类社会带来广泛而深远的影响。
随着技术的不断发展,我们期待看到更加先进的多智能体系统,它们将具备更强的自适应能力、更高效的资源调度机制和更完善的自我进化能力,为我们解决更加复杂的问题,创造更大的价值。
网页链接:多智能体协同系统:AutoGPT、BabyAGI、CrewAI及未来扩展设计
幻灯片展示:多智能体协同系统:现状与未来